© Ilkka Korpela & Aarne Hovi. Muutettu viimeksi 23.05.2012
Yleistä
Valokuvaus
Orientointityöt
1. YLEISTÄ
Pieni maastokampanja jonka tavoitteena oli saada lehdettömän ajan kuvia, referenssiksi marraskuiselle (2011) LM680 keilaukselle.
Kohteita oli 4:
- Instituutin E-puolella haapoja ,
- Impilinnan edessä A. sibirica, A. lasiocarpa ja kuollut P. engelmannii.
- Muistokuusikko pellolta kuvattuna ja
- Koivut sekä mänty Ison Saunan E-puolella.
Kussakin kohteessa kuvanottopisteet (P#) paikannettiin kahdelta takymetri-konepisteeltä (K#). K-pisteet paikannettiin XY-tasossa käyttäen
ilmakuvalta mitattuja pisteitä, joihin tähystettiin. Korkeus K-pisteille otettiin v. 2007 ja 2011 LiDAR datasta. Takymetrin asemointiin käytetyt
kiintopisteet (areafile.txt) ja vastaavat KKJ/N60 ilmakuva- (havainnot). Job-file, jossa kaikki 3.5.2012 takymetrihavainnot aikajärjestyksessä (txt).
Työ eteni K1..K7 järjestyksessä.
 Kiintopistekartta.
Kiintopistekartta.
Kuvanottopisteitä (P1-P39) perustettiin kuhunkin kohteeseen tietty määrä, ja ne mitattiin kahdesta K-pisteestä täkymetrillä (prismaa käyttäen).
Puihin heitettiin naruja, joissa oli styrox-palloja, joiden koordinaatit ratkaistiin teodoliittiperiaatteella kahdelta tai kolmelta konepisteeltä.
Lisäksi muistokuusikon reunan puihin kiinnitettiin kuusi valkoista lappua kiintopisteiksi L1-L6. Pisteet (P#, K#) merkattiin levyllä, jonka läpi oli 4" naula,
joka ankkuroi merkin maahan.
Koska ilmakuvapisteiden tarkkuus on n. 0.1 m, ja paikannuksessa käytettiin 4-8 pistettä, 25-150 m etäisyydeltä, jäi konepisteiden tarkkuus n. 0.1 m
tasolle, vaikka saavutetut keskihajonnat olivat alle 0.1 m (taaksepäinleikkauksen havainnoista takymetrin laskema). Takymetrin koordinaatiston origo tuotiin lähelle
(X = 6859800, Y = 2515100), mikä on huomioitava koordinaatteja käsiteltäessä, samoin kuin se että takymetrin koordinaatisto on vasenkätinen.
Takymetrin (Geodimeter 460) kulmahavainnot olivat asteita, minuutteja ja sekunteja, mitä ei heti tajuttu...luulimme hetken SMEAR maston olevan
2 m pois paikaltaan. 00.5959 jälkeen tulee 01.0000 Geodimeter takymetrissä (onko optio?).
Kaikki P-pisteet mitattiin kahdesti, eri K-pisteistä, jotka siis paikannettiin erikseen taaksepäinleikkauksella. Lisäksi K6-K5-K4 välille mitattiin yhteisiä pisteitä.
Näiden perusteella K5-piste on epävarmin (neljä kaukaista kiintopistettä), eikä sen P-pistehavaintoja käytetty, eikä teodoliittipaikannuksia L1-L6 pisteisiin,
vaan ne otettiin K4-pisteen havainnoista. Prisma oli joko 1.15, 2.3 tai 0.0 m korkeudella. Kojekorkeus vaihteli 1.35-1.52 m välillä.
Laskennat on koostettu Excel laskentalomakkeeksi, teodoliittilaskennassa käytetyt excel-pohjat: teodoliitti_2.xls, teodoliitti_3.xls
Takymetrin tiedostot (zip). Taulukoidut pisteiden sijainnit (html).
2. VALOKUVAUS
Kuvia otettiin 3.5. klo 18 ja 4.5. klo 17 välisenä aikana. Kuvat otettiin kahdella kameralla: Canon Powershot G6 ja Nikon D300. Kameroille tehtiin kalibroinnit
ennen kuvauksia iWitness-ohjelmalla. Canon kalibroitiin vielä uudestaan kuvausten jälkeen, mutta kalibrointi ei ollut merkittävästi muuttunut kuvausten aikana.
Kalibrointikuvaukset tehtiin sisätiloissa. Canon kalibroitiin käyttäen aukkolukua f5.6, valotusaikaa 1/100 s, ISO-herkkyyttä 200 ja automaattisalamaa.
Nikonilla aukko säädettiin lukuun f8.0, valotusajassa oli automaattisäätö, ISO-herkkyys oli 3200 ja salamaa ei käytetty.
Kalibrointiraportit: Canon ennen kuvauksia (txt), Canon kuvausten jälkeen (txt) ja Nikon (txt).
Kuvatessa kamera oli monopodin päässä. Monopodi asetettin kuvauspisteeseen ja pidettiin suorassa kuplavaa'alla. Kuvatessa kameraa voi kiertää
vapaasti atsimuuttisuunnassa. Zeniittikulmaa säädettiin monopodissa olevan nivelen avulla. Kameran atsimuuttikulma (kamerasta kohteeseen päin) mitattiin bussolilla
ja zeniittikulma arvioitiin silmänvaraisesti. Monopodin pituus kameran kiinnityskohtaan oli 1.587 m ja etäisyys maasta monopodin niveleen oli 1.533 m.
Zeniittikulman ollessa >0 kameran polttopiste ei siis ole kuvanottopisteessä, vaan liikkui siis akselin päässä, jonka pituus oli (1.587 - 1.533 + polttopisteen
etäisyys kameran alareunasta, 0.07 m ja 0.09 m, Canon ja Nikon).
Kuvauksia tehtiin useita molemmilla kameroilla. Osa kuvauksista epäonnistui huonojen valo-olosuhteiden/säätöjen takia. Instituutilta ja saunalta saatiin
onnistuneet kuva molemmilla kameroilla, impilinnalta vain Canonilla ja muistokuusikosta vain Nikonilla. Kuvien numerot, atsimuutti- ja zeniittikulmat ja
muut kuvaustiedot excel-lomakkeella: (xlsx).
3. ORIENTOINTITYÖT
Nikon-kameran jalustan nivel oli korkeudella 1.533 m maasta. Tämän pisteen yläpuolella 9 cm korkeudella arvioitiin olevan kuvatason keskipiste, josta 18 mm
optisen akselin suuntaan polttopiste (x0,y0,z0). Käyttäen pallokoordinaatteja (r, theta, phi), jossa r on säde, theta on atsimuuttikierto (-Pi...Pi) xy-tasossa ja
phi on zeniittikulma, laskettiin korjaus polttopisteen paikkaan kuvanottopisteen P (z = z + 1.533) yläpuolella, kun tiedossa olivat theta ja phi jotka kuvatessa
arvioitiin ja joista saatiin tarkka arvio iWitness IO/EO-tulostuksesta. Laskennassa käytettiin kolmiointisovellusta, jossa kaikille havainnoille oli omat painot
ja kaikki paitsi kuvahavainnoit olivat myös tuntemattomia.
HDR-tiedostojen tekoon CSV-tiedosto.
3.1 Instituutin haavat
Nikon DSC_7327...DSC_7338 -kuvaus. RMSE 10.75 um, orientoinnissa käytettiin pallojen lisäksi muutamaa ilmakuvapistettä rakennuksista.
Tukipisteiden SD:t 0.06, 0.15 ja 0.05 m (XYZ). Kaikki tiedostot zip-pakettina, mukana ohjelma, jolla tehdään kuvahavaintotiedosto iWitness-ohjelman
tulostamista kuvakohtaisista icf-tiedostoista. txt-tuloste kolmioinnista.


Näytteet (H ja INT) kuvalta 7327.


 7327, 7328, 7329
7327, 7328, 7329

 7330,
7331, 7332
7330,
7331, 7332

 7333, 7334, 7335
7333, 7334, 7335

 7336, 7337, 7338
7336, 7337, 73383.2 Impilinnan (jalo) kuuset
Canon kuvat IMG_7360...IMG_7370 (Canon PowerShot G6). RMSE 5.37 um. SD:t 0.09, 0.11 ja 0.16 m (XYZ). Kaikki tiedostot (zip). Ratkaisu (txt)

Kamerapisteet ovat Impilinnan N ja W puolella, kuvaussuunta S-SW. Engelmanniin kuuseen osuneita pulsseja.


 7360, 7361, 7362
7360, 7361, 7362 

 7363, 7364, 7365
7363, 7364, 7365


 7366, 7367, 7368
7366, 7367, 7368
 7369, 7370
7369, 7370
3.3 Muistokuusikko
Nikon DSC_7429..DSC_7437 kuvat. RMSE 10.8 um. Suurimmat kuvavirheet 40 um, latvuksissa. SD:t 0.09, 0.15 ja 0.04 m tunnetuissa pisteissä. Kaikki tiedostot (zip). Ratkaisu (txt)
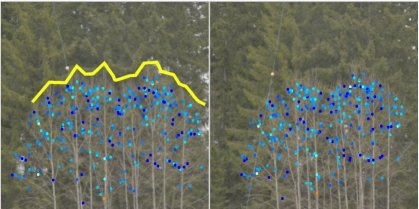
Yhdeksän kuvaa kuudelta pisteeltä. Harmaalepikkö nuistokuusikon edessä: toisin kuin kuusen oksien kohdalla - pulssi painuu läpi ja kaiku tulee alempaa.


 7429, 7430, 7431
7429, 7430, 7431

 7432, 7433, 7434
7432, 7433, 7434

 7435, 7436, 7437
7435, 7436, 74373.4 Koivut ja mänty (Iso Sauna)
Nikon 7353..7369 kuvat. RMSE 16.5 um. SD:t 0.13 m, 0.14 m, ja 0.12 m. Kaikki tiedostot (zip), ratkaisu (txt).

Kuvaussuunta W-NW. Rannassa tuuli jonkin verran koko päivän. Se, ja lähellä olleiden tukipistepallojen (ja liitospisteiden) XYZ epävarmuus. um kuvahavainnolle lähellä ja kaukana on eri asia.
First-return intensiteettejä, Riegl.

Neljä pulssia, joka ovat tuottaneet osuman suuren koivun oksasta. Kuvat alaviistosta/alta.


 7353, 7354, 7355
7353, 7354, 7355

 7356, 7357, 7358
7356, 7357, 7358

 7359, 7360, 7361
7359, 7360, 7361

 7362, 7363, 7364
7362, 7363, 7364

 7365, 7366, 7367
7365, 7366, 7367
 7368, 7369
7368, 73693.5 A-talon maisema
Nikon DSC_7387...DSC_7396 -kuvat. RMSE 8.2 um, orientoinnissa käytettiin ilmakuvapisteittä rakennuksista, joiden välille asetettiin lisäksi Z- ja XY-yhtäsuuruusehtoja. Tukipisteiden SD:t 0.15, 0.17 ja 0.14 m (XYZ). Tukispisteistä osa oli varsin kaukana. Yhteiset pisteet "panorama" blokin ja tämän blokin välillä ovat noin 5-10 cm tarkkoja. Kaikki tiedostot zip-pakettina, mukana ohjelma, jolla tehdään kuvahavaintotiedosto iWitness-ohjelman tulostamista kuvakohtaisista icf-tiedostoista. txt-tuloste kolmioinnista. Blokkiin lisättiin joitakin pisteitä kuvamitt-ohjelmalla, koska iWitness vaatii aina kuvasuorien leikkauksen jokaiselle pisteelle.
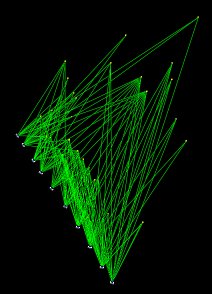

Kuvanottopisteet ovat yhdellä linjalla. Mänty 135 m päässä kuvilla 7389 ja 7390. Muutaman pikselin epävarmuus.


 7387 7388 7389
7387 7388 7389

 7390 7391 7392
7390 7391 7392

 7393 7394 7395
7393 7394 7395 7396
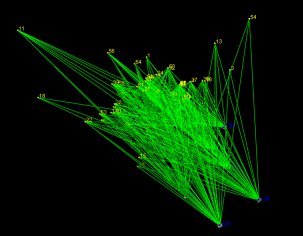
73963.6 Panorama -kuvaus
Nikon DSC_7397...DSC_7423 -kuvat. RMSE 12.00 um. SD:t tukipisteille 0.28, 0.23 ja 0.31 m. On huomioitavaa, että tukipisteitä oli 150 x 200 m alueella, kun taas kuvanottopisteet
olivat 50 x 70 m T-kirjaimen muotoisella alueella. Joidenkin pisteiden osalta avauskulmat (kuvakanta) jäi pieneksi. Suurimmat jäännösvirheet oli länteen (Kuivajärveä kohti) katsovissa kuvissa, joissa
liitospisteet olivat puiden latvoja (tuulessa). Kaikki tiedostot zip-pakettina. Kolmioinnin txt-tuloste. Huom! Joidenkin tukipisteiden välillä Z = Z havaintoyhtälöitä.
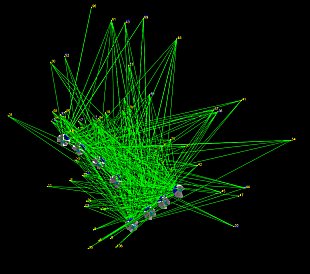
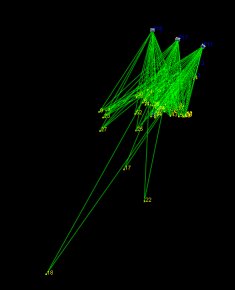
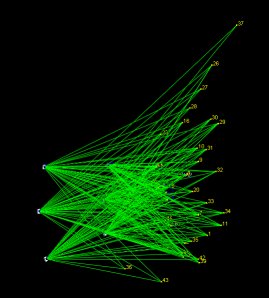
Kamerapisteet (harmaat) muodostavat T-kirjaimen. Jokaiselta otettiin 3-4 kuvaa eri suuntiin. Kaukana olevien liitospisteiden kulmat ovat pieniä.


Yo. kuvasädekuvan oik. alakulman piste (valaisimen kupu ja tolppa), johon tulostettu 6 LiDAR pistettä. Epipolaarisuorat 2.5 km korkeudesta nähtynä havainnollistavat
terävää leikkausta (huono geometria).


 7397, 7398, 7399
7397, 7398, 7399

 7400, 7401, 7402
7400, 7401, 7402

 7403, 7404, 7405
7403, 7404, 7405

 7406,
7407, 7408
7406,
7407, 7408

 7409, 7410, 7411
7409, 7410, 7411

 7412, 7413, 7414
7412, 7413, 7414

 7415, 7416, 7417
7415, 7416, 7417

 7418, 7419, 7420
7418, 7419, 7420

 7421, 7422, 7423
7421, 7422, 7423