Koeala Lapinkangas3, LK3, Marv1/2009/4
Takaisin
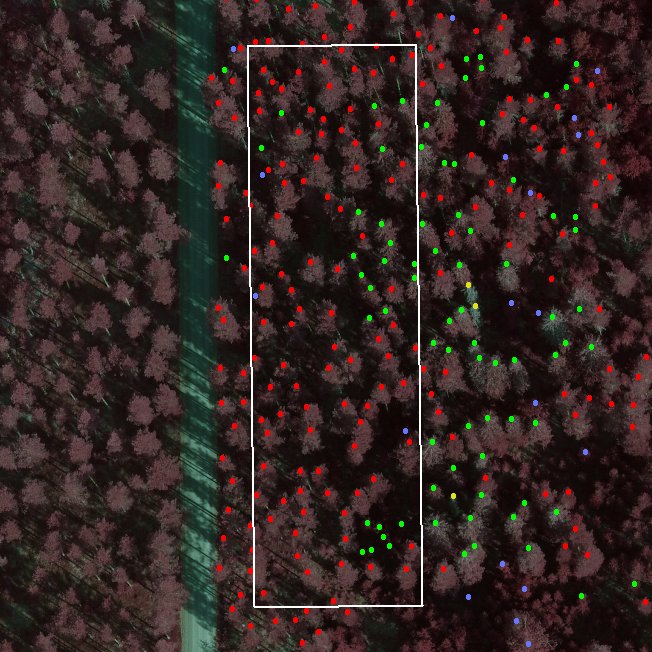
Koealan koko: 100 x 30 m
Origo (KKJ): 2516596.00, 6856480.00
Kierto: +14 astetta
Puusto vanhaa männikköä VT-hiekkakankaalla. Koealan
itäreunassa puusto vaihettuu kuusivaltaiseksi.
Rinnankorkeusikä satunnaisesti valituista puista 69, 84, 74, 122,
108 ja 103 v. Puusto siis todennäköisesti luontaisesti
syntynyt ja iältään n. 100 vuotta. Alue ollut useana
vuonna metsäekologian kenttäkurssin opetuskohteena,
mistä aiheutunut kunttakerroksen rikkoutuminen lienee
osasyynä tiheän kuusialikasvoksen syntymiseen. Koealalla on
erittäin runsaasti pieniä, alle 1m kuusia.
2009 Puuston kartoitus ja mittaukset
Kartoitus
Vallitsevan latvuskerroksen puut (N=181) koealalta sekä 5
m puskurista kartoitettu fotogrammetrisesti (Ilkka Korpela)
Marv1-kurssin koealojen kartoituksen yhteydessä kesäkuussa
2009. Latvat ilmakuvalla.
Puukartta (Pdf).
Maastomittauksin todennettiin fotogrammetrisen puiden paikannuksen
keskimääräiseksi tarkkuudeksi tällaisessa
järeässä puustossa 35 cm.
Omissiopuut ja alikasvospuut koealan sisäpuolelta
(h>30cm, N=3311) kartoitettu maastotyönä vaijerin ja
suorakulman avulla (Pauliina Kulha ja Aarne Hovi). Alikasvoskartta (Pdf). Menetelmässä
viritetään vaijeri (=vektori) kahden puun väliin.
Vaijerin päät saadaan paikannettua tasoituslaskennan avulla
15 cm keskimääräisellä tarkkuudella
KKJ-koordinaatistoon käyttämällä
kiintopisteinä fotogrammetrisesti kartoitettuja puita.
Z-koordinaatit (korkeus merenpinnasta) lasketaan LiDAR-maastomallista,
kun tunnetaan kunkin pään korkeus maanpinnasta. Vaijeriin on
kiinnitetty mittanauha, ja suorakulmaa käyttäen mitataan
kullekin puulle kuljettu matka vektorin alkupisteestä sekä
puun etäisyys vektorilta. Kartoituksessa edetään
kaistoittain. Vaijeri viritetään kaistan (lev. 6-8 m)
keskelle. Menetelmän tarkkuutta testattiin jatkuvasti
kartoittamalla sillä myös jo fotogrammetrisesti kartoitettuja
puita. Lopuksi tehtiin lisäksi tarkistusmittaus, jossa mitattiin
menetelmällä kartoitettujen puiden välisiä
etäisyyksiä maastossa kaistojen sisällä sekä
kaistojen välillä. Kartta (Pdf).
Tarkistusmittaukset osoittivat, että menetelmällä
päästiin puiden paikannuksessa n. 15 cm
keskimääräiseen tarkkuuteen.
Puustomittaukset
Maastotyöt tehty 28.7.-14.8.2009. Pauliina Kulha ja Aarne
Hovi. Mittausselostus (Word).
Mittaukset Fotopuista koealalta sekä 5 m
puskurista (N=181):
- puidenluku (Fotopuuluokka, jakso, puulaji, puuluokka ja d13) 28.7.2009
- h ja hc (Vertex) 28.-29.7.2009
- viiden vuoden sädekasvu (kasvukaudet 2004-2008) kairaamalla
havupuista (N=176) 29.7.2009
- mittaustiedot (XLS)(ASCII)
Alikasvoksen/omissiopuiden (N=3311) mittaus
ja kartoitus koealan sisältä (30.7.-14.8.2009):
- kaikki ilmakuvalla näkymättömät puut (h>30 cm)
kartoitettiin ja mitattiin
- h kaikista puista (h<5m: latta, h>5m: Vertex)
- d13 joka 3. kaistalta puista, joiden d13>50mm sekä muiltakin
kaistoilta, jos puu kuului selvästi vallitsevaan latvuskerrokseen
- koealan keskiosassa erittäin runsaasti pieniä
männyntaimia, rajattiin alue jolla pituusraja nostettiin 50
cm:iin. Kartta (Pdf)
Alikasvosmittausten tiedot yhtenä
tiedostona (XLS)
Tasoituslaskennassa käytetyt tiedostot:
Suuntimat (ASCII)
Tasoituslaskennan parametrit (ASCII)
Tasoituslaskennan tulokset (ASCII)
Myöhemmin voidaan vektoreiden
alkupäiden paikannustarkkuutta parantaa
ylimääräisillä etäisyyshavainnoilla, joita
saadaan vaijerin ja suorakulman avulla kartoitetuista ilmakuvapuista:
Ylimääräiset
etäisyyshavainnot (ASCII) / (XLS)
Maastolomakkeet:
Kaikki maastohavainnot (XLS)
Vektoreiden alku- ja loppupisteiden paikannus (ASCII)
Vaijerin ja suorakulman avulla kartoitettu alikasvos (ASCII)
Vaijerin ja suorakulman avulla paikannetut ilmakuvapuut (ASCII)
Tarkistusmittaukset:
Tarkistusdata: suunta- ja
etäisyyshavainnot (ASCII)
Tarkistusdata: puiden väliset etäisyydet (ASCII)
Puustotiedot 2009
(ilmakuvapuut + alikasvos) yhtenä tiedostona (ASCII)
-ilmakuvapuut paikannettu Kuvamitt-ohjelmalla uudestaan
keväällä 2010 tarkkuuden parantamiseksi
-alikasvospuiden paikannus tehty käyttäen uudelleenmitattuja
ilmakuvapuita kiintopisteinä, paikannustarkkuutta parannettu
ottamalla lisäetäisyyshavaintoja vaijerin alkupäille
suorakulmalla paikannetuista ilmakuvapuista sekä poistamalla
yksittäisiä virheellisiltä vaikuttavia
kiintopistehavaintoja
-alikasvospuiden koealan sisäinen paikannustarkkuus 0.07 m todettu
mittaamalla puiden välisiä etäisyyksiä maastossa
-ulkoinen tarkkuus <0.15 m todettu laserdatan avulla
käyttämällä puiden latvuksia 3D-signaaleina
2011 Valokuvaus
Ilkka Korpela (HY), Lauri Korhonen (ISY).
Ti 7.6. - Pe 10.6. Koealalle perustettiin takymetrin avulla
kuvanottopisteiden verkko. Osa pisteistä sijoitettiin paikkaan,
johon tiedettiin osuneen
latvuston lävistänyt pulssi, kun taas osa pisteistä oli
tarkoitettu latvusten kuvaamista varten. Latvustoon heitettiin
virvelillä naruja, joihin puolestaan
kiinnitettiin läpimitaltaan 150 mm:n styroxpalloja, 3 + 3 + 2 + 2
+ 2, yht. 12 kpl. Ne paikannettiin käyttäen takymetriä
teodoliittina. Takymetripisteiden
tarkkuus oli parempi kuin 1 cm, yleensä alle 5 mm X ja
Y-koordinateille ja alle 3 mm Z-koordinaatille. Pallojen koordinaattien
tarkkuus oli 4 cm.
Kuvaus tehtiin perjantaina 10.6. sään ollessa pilvetön
koko päivän. Neljä takymetripistettä paikannettiin
KKJ-järjestelmään ottamalla bussolisuuntia ja
etäisyyksiä lähipuihin (n = 13-17). Järjestelmien
välille laskettiin siirto ja kierto xy-tasossa ja
jäännösvirheiden (8 kpl) RMSE (df = 5) oli 7 cm.
Kuvat otettiin monopodilla, h = 1.53 m. Jos
kamerakoordinaatisto on oikeakätinen, kuvaa x-akseli
sarakejärjestystä. y-akseli on yhdensuuntainen
rivien kanssa, joskin vastakkaismerkkinen. Tällöin
kamerakoordinaatiston z-akseli osoittaa kuvatasosta linssin optisen
akselin suuntaan. Kun monopodin
päässä olevaan kameraa kierrettiin pystysuunnassa
(kuvaus ylöspäin), kiertyi projektiokeskus tämän
liikkeen mukana alaspäin ja poispäin kohteesta.
Liikeradan säde oli noin 7 cm. Tällöin esim.
pystysuoraan kuvattaessa, oli projektiokeskus 7 cm etelään
kuvanottopisteen XY-sijainnista ja noin
1.47 m korkeudella. Kamerassa ei ole ulkoisia merkkejä kuvatason
sijainnista, ja sijaintiin jää näin
väistämättä n. 1 cm epävarmuus.
Kaikki pystykuvat otettiin siten, että
kamerakoordinaatiston z-akseli osoitti ensin pohjoiseen, ja y-akseli
itään, jonka jälkeen kamera kierrettiin
y-akselin ympäri siten, että kamera oli pystysuorassa.
Tällöin x-akseli osoittiin etelään ja z-akseli
(linssi) suoraan ylös. Kuvat eivät ole täydellisiä
pystykuvia, sillä vaaituskupla oli monopodin jalassa ja kamera oli
silmävaraisesti orientoitu monopodin suuntaiseksi.
Muut kuvat otettiin siten, että kameraa kierrettiin ensin
xy-tasossa (atsimuutti) kohti kohdelatvusta, jonka jälkeen
korjattiin pystykulmaa (zeniittikulma).
Molemmat arvioitiin ja kirjattiin ylös lähtölikiarvojen
laskentaa varten.
Kuvausjaksot 08:45-09:38, 11:57-13:13, 18:18-19:09 ja
##:##-##:##.
Suuntimat ja etäisyydet neljältä
takymetripisteeltä, (ASCII).
Indeksikuvat (linkki)
Teodoliitti Excel-laskentapohja (XLS)
(korjattu 28.10.2011, AH)
Takymetrihavainnot sekä koordinaatiston muunnos KKJ2 ja
takymetrikoordinaatiston välillä (XLS)
Kuvauspaalujen korkeudet maanpinnasta (TXT)
Kamera Canon Powershot G6 (kalibrointi, kts. RSE Korpela I.
2008)
Kuvien orientointi
(tehty 30.8.-28.10.2011, Aarne Hovi):
Kamera kalibroitu uudelleen iWitness-ohjelmalla,
kalibrointiraportti (TXT).
Orientointi tehtiin kahdessa vaiheessa: 1) Liitospisteiden
mittaus ja karkea orientointi iWitness -ohjelmalla. Kuvat jaettiin
blokkeihin (15 kpl) kuvausajankohdan ja kuvaussuunnan mukaan.
iWitnesissä tehtiin ensin blokin kuvien keskinäinen
orientointi, minkä jälkeen tuotiin blokki
KKJ-koordinaatistoon (kierto, siirto ja skaalaus) tunnettujen kameran
paikkojen avulla. Kameran paikkoihin laskettiin korjaus kameran
kallistuksen mukaan. Liitospisteiden RMS iWitnesissä oli n.
0.5-2.0 pikseliä. Liitospisteiden ratkaisuissa oli orientoinnin
jälkeen harhaa max 10 cm. 2) Kolmionti Ilkan omalla ohjelmalla.
Kolmionti tehtiin blokkitasoituksena, kaikki kuvablokit yhdessä.
Kameran orientointiparametrien lähtölikiarvoina
käytettiin iWitness -ohjelmalla saatuja ratkaisuja (omega, phi,
kappa) ja takymetrilla mitattuja koordinaatteja (XYZ). Lisäksi
käytettiin tukipisteinä latvuksissa olleita palloja,
sekä etsittiin yhteisiä liitospisteitä blokkien
välillä (104 pisteparia) joiden ratkaisut pakotettiin
samoiksi. Kameran orientointiparametreille, kuvahaviannoille ja
maastotukipisteille annettiin painot oletetun tarkkuuden mukaan.
Liitospisteiden RMS oli 3.46 um (~ 1.5 pix).
KUVAMITT tiedostot
linssivirheestä korjatuille kuville (ZIP).Yhteensä
284 orientoitua kuvaa. csv -tiedosto hdr:ien tekoon (CSV)
Kameran paikkojen lähtölikiarvojen laskenta iWitness
-orientointia varten (XLS).
Input -tiedostot kolmiontia varten: a) task (TXT), b) kuvahavainnot (m),
linssivirheet korjattu (TXT),
c) gcp + liitospisteet (TXT),
d) kameran lähtölikiarvot (TXT), e) Z-pakotteet
yhteisille pisteille (TXT),
f) XY-pakotteet yhteisille pisteille (TXT).
Kolmioinnin ratkaisu, kameroiden orientointiparametrit ja
liitospisteiden koordinaatit (TXT).
Kolmiointi-ohjelma VB6.0 (zip).
Puulaji / Species 2009
1 = Mänty, Scots Pine, Pinus sylvestris
2 = Kuusi, Norway Spruce, Picea abies
3 = Rauduskoivu, Silver Birch, Betula pendula
4 = Hieskoivu, Downy Birch, Betula pubescens
5 = Haapa, Aspen, Populus tremula
6 = Harmaaleppä, Grey Alder, Alnus incana
7 = Tervaleppä, Common Alder, Alnus glutinosa
8 = Tuomi, European Bird Cherry, Prunus padus
9 = Lehtikuusi, Larch, Larix sp.
13 = Raita, Goat Willow, Salix caprea
16 = Pihjaja, Rowan, Sorbus aucuparia
20 = Muu lehtipuu (selitys huomautuksissa), other broadleaved (species
mentioned in notes)
21 = Muu havupuu (selitys huomautuksissa), other coniferous (species
mentioned in notes)
LU 2009
11 = Elävä, normaali latvus
(living, normal crown)
12 = Elävä, latva vahingoittunut tai latvus
merkittävästi epäsymmetrinen
(living, crown defected / notably
asymmetric)
- esim. latva
katkennut / toispuoleinen / piiskautunut / 2-haarainen / latvus
supistunut
13 = Elävä, kituva
(living, 'about-to-die')
14 = Elävä, vinossa, >1m
(living, badly oblique, >1m)
21 = Kuollut, pystyssä (dead,
standing)
22 = Kuollut, pystyssä, runko katkennut eli
pökkelö
(dead, trunk cut)
23 = Kuollut, maassa
(dead, trunk on forest floor / fallen)
31 = Kanto, sahattu
(stump, tree felled)
32 = Myrskynkaato
(wind blow, alive or dead, c.f. 23)
41 = Hävinnyt
(vanished, tree could not be found again)
Jakso / Storey 2009
1 = ylempi / upper
2 = alempi / lower
FotopuuL / Photo-tree class 2009
0 = koealan ulkop. / outside the plot
1 = koealan sisäp. / inside the plot
2 = komissiopuu / commission tree
3 = omissiopuu / omission tree
|
{kind=link}