Ilmakuvat ja laserkeilaus metsänmittauksessa - tutkimusten ja menetelmien esittelyä 3
Puut ilmakuvilla - algoritmi latvapisteiden automaattiseen paikantamiseen
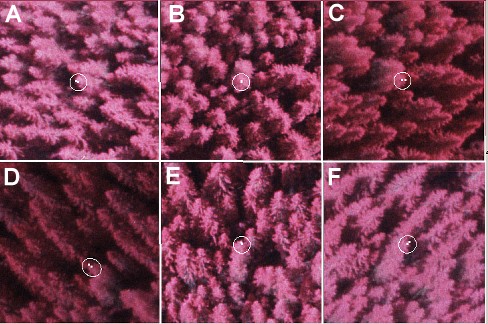
Puoliautomaattinen algoritmi perustuu yhteen mallipuuhun, jonka latvapisteen tarkka XYZ-sijainti mitataan manuaalisesti, osoittamalla latvapistettä eri kuvilla ja laskemalla kuvasäteiden avaruusleikkauksena pisteen sijainti. Sen jälkeen piste projisoidaan takaisin kuville ja kuvilta kaapataan ellipsinmuotoisia mallikuvia, jotka ilmentävät sitä, miltä latvukset kullakin ilmakuvalla keskimäärin näyttävät. Mallipuun latvus jää ellipsien sisään.
Kuljettamalla ellipsejä kullakin ilmakuvalla ne muunnetaan korrelaatiokuviksi, joissa kirkkaat kohdat ilmentävät suurta todennäköisyyttä sille, että siinä kohtaa kuvaa on latvapiste. Yllä ilmakuvasarjan kuvan B:n korrelaatiokuva.
Lisää tutkimuksista Sisällysluettelo
Seuraavassa vaiheessa rajataan hakuavaruus, josta puiden uskotaan löytyvän. Puita etsitään maanpinnan (DEM) ja pisimpien puiden välisestä avaruudesta. Laserkeilaus on tässä apuna. Keilaus tuottaa luotettavan maanpintamallin, ja harvankin (ja edullisen, noin yksi piste neliömetrille tiheydellä) keilauksen korkeimmista osumista voidaan tehdä latvuston likimääristä korkeutta kuvaava pintamalli eli hakuavaruuden yläpinta. Koska pienet puut eivät näy ilmakuvilla, ei niitä kannata etsiä. Näin ollen hakuavaruuden alapinta laitetaan noin 50% suhteelliselle korkeudelle. Näin syntynyt, eri paikoissa vaihtelevan syvyinen ja eri korkeusasemassa oleva hakuavaruus täytetetään XYZ-pisteillä, joille haetaan seuraavassa vaiheessa kaikilta korrelaatiokuvilta korrelaatiosumma (alla).
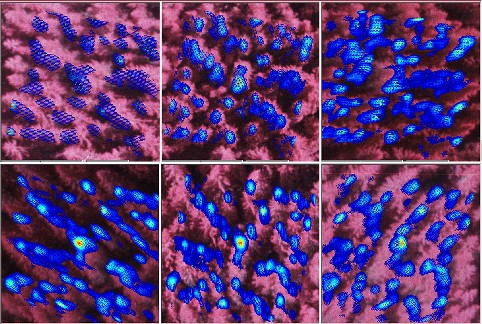
Kuvaan on projisoitu ne hakuavaruuden pisteet, joissa eri ilma(korrelaatio)kuvilta summattu korrelaatio ylittää tietyn raja-arvon. Väri ilmentää korrelaation suuruutta. Hakuavaruuteen syntyy "kuumia pisteitä". Jatkuu...