| The STRS method
applied on MARV4/2 Introduction - Manual photogrammetric 3D tree top positioning Photogrammetry can be applied to map 3D tree top positions. This requires that at least two images are available: 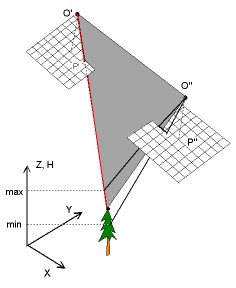
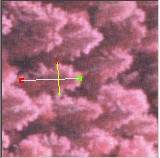
Photogrammetric treetop positioning from an image
pair. Upper figure gives the principle - lower figure displayes a real case.
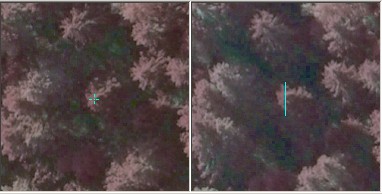
The operator (human) points the treetop in the left image and this image ray
down towards the tree from the left camera is displayed over a range in Z
in the right image with the blue line. The corresponding tree top can only
reside along this ray - the epipolar line. The operator has to find the same
object poit - treetop - by following the line.

When the tree top is pointed in the right image, we
have two image observations, i.e. two image-rays or 3D lines that nearly meet
(intersect) in the object space. We find that 3D point by a method called
least square ray-intersection. This is our estimate of the treetop position.
Here that point is displayed in green. If we know the terrain elevation at
that XY-location, we have an estiomate for tree height, 19.4 m here. The white
line is a fictious trunk that connects the top with the base.
Note: Optionally it is possibly to use stereo measurements, where the operator sees a stereo model made of an image pair and places the 3D measurement mark on the tree top. This requires a good stereo vision. |
Back to index, Next
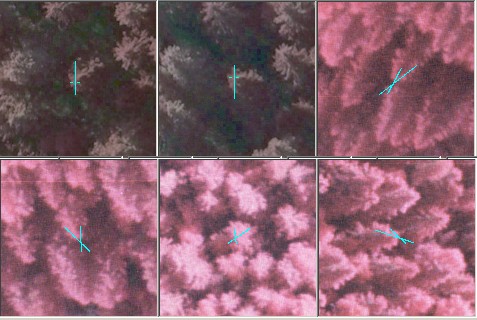
Treetop positioning using a set of six images. The
estimation is more accurate and the solution of the correspondence problem
is more reliable if several views are available (comparable to #DOP-values
in satellite positioning). In the example, the tree top was pointed in the
two leftmost images on the upper row. Their image-rays are dispayed over range
of 10 meters in Z (± 5 m around "Z-good-guess") and the epipolar line
segments intersect in the other 4 views over a tree top. The "Z-good guess"
i.e. the expected elevation of the tree top has to be set by the operator
in the beginning. Later it can be the elevation of the previously measured
tree.
An example of the measurability of trees in six spruce
stands. The likelyhood is a exponential function of the relative height of
the tree. Stand density execises an effect as well. S3 is an unmanaged dense
stand. S1 has been thinned most.
The operator can select a view in which the crown
is best seen and make a measurement of the crown edges - here perpendicularly
to the direction of the trunk. With the image scale known, the pixel size
in meters is known and the measured image distance can be converted into an
observation in meters, here 3.71 m.
|