Metsikkökoealojen (ilmakuva)puut on mitattu monoplotting -tekniikalla, jossa latvapisteen sijainti osoitetaan ilmakuvalta ja latvan XYZ sijainti
ratkaistaan syntyvän (avaruus)kuvasuoran ja kohteeseen osuneiden laserpisteiden avulla. Menetelmä on vaihtoehto monikuvamittaukselle,
jossa sama latvapiste osoitetaan usealta kuvalta ja sijainti lasketaan avaruuskolmiointina.
1. LATVAN PAIKANNUS
LiDAR-monoplotting
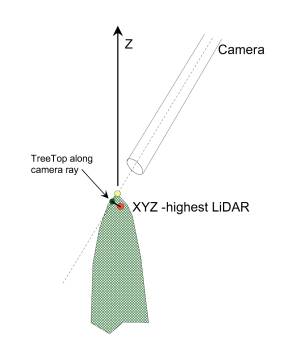
Ilmakuvalta osoitettu latvapisteen paikka kuvatasolla, kameran sisällä, pisteessä (x, y, c) (c=polttoväli)
sekä kameran pääpiste (x0, y0, z0) sijaitsevat avaruus(kuva)suoralla, jota jatketaan kohti kohdetta, ja
joka muunnetaan "kuvaputkeksi". Paikannettavan latvan sijainnista on olemassa jokin arvaus, eritoten
koskien Z-koordinaattia. Tällöin osataan rajata geometrisesti LiDAR-pistepilvestä osajoukko, jonka pisteitä
testataan, ja tutkitaan, mikä piste "tulee ensimäisenä vastaan kuvaputkessa". Tällä LiDAR xyz-pisteellä
on etäisyys d kameraan. Latvapisteen paikka ratkaistaan sijoittamalla d kuvasuoran yhtälöön eli
venyttämällä kuvasuoraa kamerasta etäisyyden d verran.
- XY-tarkkuus melko hyvä
- Riittää latvan osoittaminen yhdeltä kuvalta
- Z aliarvioituu, koska LiDAR osumat harvoin latvakasvaimen kärjestä
 Monikuvamittaus
MonikuvamittausJos käytettävisä ei ole LiDAR dataa, ja halutaan harhattomia Z-koordinaatteja, voi latvat paikantaa fotogrammetrisesti
monikuvamittauksella (multi-image matching). Sama latvapiste osoitetaan vähintään kahdelta kuvalta. XYZ koordinaatit
lasketaan samalla PNS-tekniikalla kuin XY-koordinaatit RESECTION-ohjelmassa - erona se, että maastossa puille havain-
taan suuntia (puolisuoria tasossa) ja ilmakuvan tapauksessa kuvakoordinaatteja (puolisuoria avaruudessa).
2. MUUT TUNNUKSET
Kullekin ilmakuvapuulle ratkaistaan:
- Latvan paikka, XYZ (kts. yllä)
- Puun pituus, h, käyttäen
laserkeilausaineistosta laadittua maaston korkeusmallia (latvan Z -
maanpinnan Z).
- Latvusmalli ja siitä latvuksen leveys, dcrm
- Puulaji, Sp, a) Visuaalinen tulkinta b) kuva- ja/tai laserpiirteillä luokiteltu
- Rungon rinnankorkeusläpimitta, epäsuorasti, ennustamalla d1.3 = f (spp, h, dcrm) -funktioilla (Kalliovirta ja Tokola, 2005 (Silva Fennica)).
 Latvuksen muoto
ratkaistaan sovittamalla puusta heijastuneisiin
laserkeilaus(LiDAR)pisteisiin
Latvuksen muoto
ratkaistaan sovittamalla puusta heijastuneisiin
laserkeilaus(LiDAR)pisteisiin kolmiparametrinen latvuksen muodon (mallinnetaan latvuksen sädettä) kuvaava malli. Mallilta voidaan
ratkaista latvuksen leveys, dcrm.
Puulaji ratkaistaan ottamalla latvuksen pinnalta, myötä- ja vastavalon puolelta, 40% latvasta alaspäin, eri korkeuksilta kuvanäytteitä ilmakuvilta sekä laserpiirteistä, jotka lasketaan niiden pisteiden intensiteetistä,
jotka ovat lähellä saadun latvusmallin pintaa. Myös operaattori antaa arvion puulajista, visuaalisena tulkintana.
Tämän jälkeen rungon läpimitta voidaan laskea allometrisilla yhtälöillä ja edelleen rungon tilavuus / runkokäyrä muilla allometrisilla yhtälöillä.
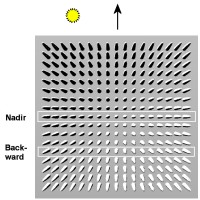
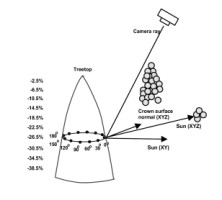
Valaistus- ja katselugeometria määräävät puiden spektrin. Latvuksen näytteistys ja LiDAR-pisteiden käyttäminen varjostuksen ja katveiden määrittämiseen.
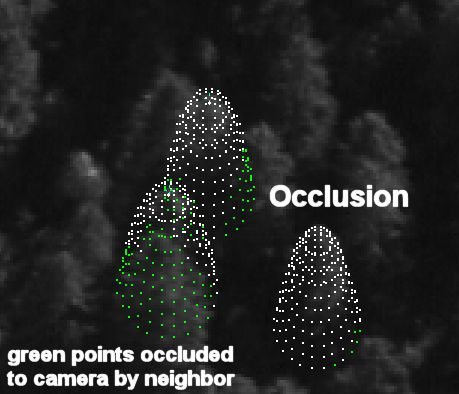

Latvusmallin pinnalta otetuille xyz-pisteille (näytteet) voidaan määrittää laserpisteiden avulla se, näkyykö piste kameraan, vai onko se puun itsensä tai naapurin
katveessa (occluded). Määritys perustuu säteenseurantaan: pisteestä lähetetään säde kohti kameraa ja tutkitaan onko matkalla "laserpalloja", jotka siis
mallintavat ympäristöä. Sama voidaan tehdän auringon suhteen, jolloin ratkaistaan varjostus (shading). Näin voidaan kerätä sävyarvonäytteitä suorassa valossa
ja varjossa olevista kohteista ja hyödyntää näytä puulajiluokituksessa erillisinä piirteinä (selittäjinä).
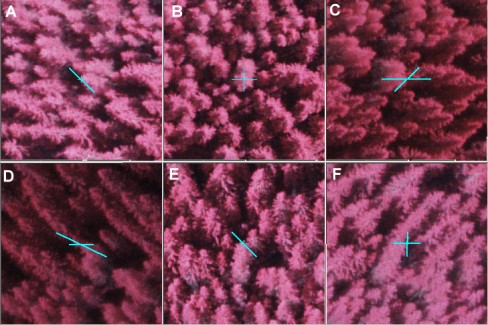
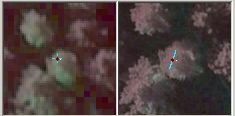
Esimerkki: Ilmakuvapari männystä, vas. 25 cm oik. 9 cm resoluutio.
 1. Operaattori
osoittaa latvan, ja latvapisteen XYZ-ratkaisu pakotetaan tälle
avaruussuoralle LiDAR pisteiden avulla.
1. Operaattori
osoittaa latvan, ja latvapisteen XYZ-ratkaisu pakotetaan tälle
avaruussuoralle LiDAR pisteiden avulla.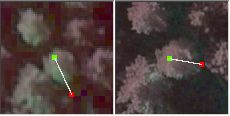 2. Maanpinta antaa
puun pituuden, kuvaparille on projisoitu "runko" eli vektori latva -
maanpinta
2. Maanpinta antaa
puun pituuden, kuvaparille on projisoitu "runko" eli vektori latva -
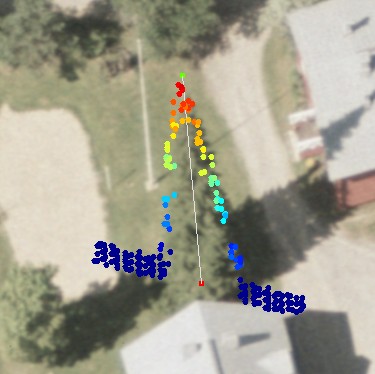
maanpinta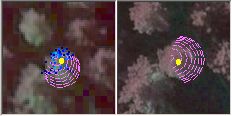 3. Laserosumat
kerätään "sopivalta alueelta", aina 60% suhteelliseen
korkeuteen asti. Näihin pisteisiin sovitetaan
3. Laserosumat
kerätään "sopivalta alueelta", aina 60% suhteelliseen
korkeuteen asti. Näihin pisteisiin sovitetaan malli latvuksesta käyttäen painotettu pienimmän neliösumman menetelmää (iteroidaan malli kohdilleen, epälineaarinen latvusmalli).
"Sopiva alue" tulee puun pituudesta ja ilmakuvan sävyarvosta (Puulaji). Puulaji ja pituus antavat vaihteluvälin odotusarvon latvukselle.
Laserosumat on väritetty kuvassa intensiteetin mukaan - niistä lasketaan laserpiirteitä: keskiarvo, keskihajonta, minimi ja maksimi.
Keltaiset pisteet ovat vastavalon puolen näytteenottopiste latvusmallin pinnalla, joka on projisoitu kuville. Näytteenotossa otetaan
talteen R,G,B,NIR ja PAN -arvot sekä tieto siitä mistä 3D-suunnista auringon valo ja kamera katsovat pisteitä (Wiki: BRDF).
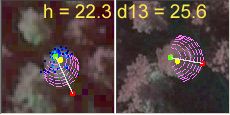 4. Puulaji, h ja
latvuksen leveys, 60% suht. korkeudella selittävät d13:a.
Tässä Mänty, h = 22.3, latvuksen leveys 3.9 m => d13
25.6 cm.
4. Puulaji, h ja
latvuksen leveys, 60% suht. korkeudella selittävät d13:a.
Tässä Mänty, h = 22.3, latvuksen leveys 3.9 m => d13
25.6 cm.Yhden puun mittaus vie noin 2-3 sekuntia.
Huomioitavaa 2011 mittauksista!!!
Fotogrammetriset mittaukset tehtiin käyttäen ilmakuvia vuosilta 2006, 2008 ja 2010 sekä laseraineistoja vuosilta 2006, 2007, 2008 ja 2010. Puiden pituus mitattiin käyttäen vuoden 2010 laseria, ja on siten mahdollisimman tarkka lukuun ottamatta kesän 2011 kasvua. Puiden havaitsemiseen käytettiin sekä vuoden 2010 että aikaisempia ilmakuvia. Tämän takia kartoilla saattaa olla puita, jotka eivät enää ole pystyssä. Erityisesti talvella 2010 tapahtui paljon lumituhoja, jotka aiheuttivat metsiköissä poistumaa.