Mallin laadinnassa on oleellista luokitella laserosumista, joita oli 10-15 per neliömetri, ne, jotka ovat todellisuudessa osuneet maahan.
Laadinta perustui kotikutoiseen, varsin yksinkertaiseen algoritmiin, kursivoidut kohdat ovat muuteltavia parametreja.
1) Jaa mallinnittena alue
soluihin (hilakoko), esim. 2 x 2 m
2) Hae jokaisen solun alin osuma. Tulosta ne, jotka ovat korkeintaan 0.3 m sitä ylempänä (Z-väli)
3) Tulosta nämä ja laadi niistä kolmioverkko TIN-malli (Triangular Irregular Network)
4) Tutki kolmioverkon solmut (pisteet) ja poista ne jotka ovat epäuskottavia piikkejä. Epäuskottava piste on sellainen, johon pääsee vain kolmiotasoja joiden kaikkien jyrkkyys ylittää 15°.
5) Laadi näistä pisteistä uusi TIN ja tarkastele sitä visuaalisesti, hyväksy maastomalli tai palaa kohtaan 4) poistamaan piikkejä.
2) Hae jokaisen solun alin osuma. Tulosta ne, jotka ovat korkeintaan 0.3 m sitä ylempänä (Z-väli)
3) Tulosta nämä ja laadi niistä kolmioverkko TIN-malli (Triangular Irregular Network)
4) Tutki kolmioverkon solmut (pisteet) ja poista ne jotka ovat epäuskottavia piikkejä. Epäuskottava piste on sellainen, johon pääsee vain kolmiotasoja joiden kaikkien jyrkkyys ylittää 15°.
5) Laadi näistä pisteistä uusi TIN ja tarkastele sitä visuaalisesti, hyväksy maastomalli tai palaa kohtaan 4) poistamaan piikkejä.
MARV1-2008 Koeala 4,
suodattamaton TIN, joka saatu
solujen minimiarvoja (Z) lähellä olevista pisteistä.
Tarkempi
näkymä kolmioverkkoon.
MARV1-2008 Koeala 4. suodatettu TIN kolmen
suodatuskierroksen
jälkeen.
Koska TIN on
laskennallisesti huono tiedon
esitysmuoto (sen kolmion nopea löytäminen, johon piste (X,Y)
kuuluu,
on hidasta), tehtiin TIN2RASTER muunnos, jossa jokainen TINin kolmio
skannattiin
XY-hilassa ja saatu Z-arvo tallennettiin rasteri (kuva) muotoon, jota
on
nopea käsitellä. Muunnoksessa menetetään joitakin
senttimetrejä
tarkkuudessa interpoloinnin takia.
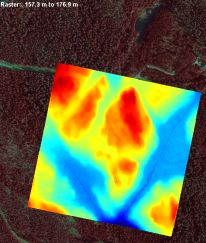
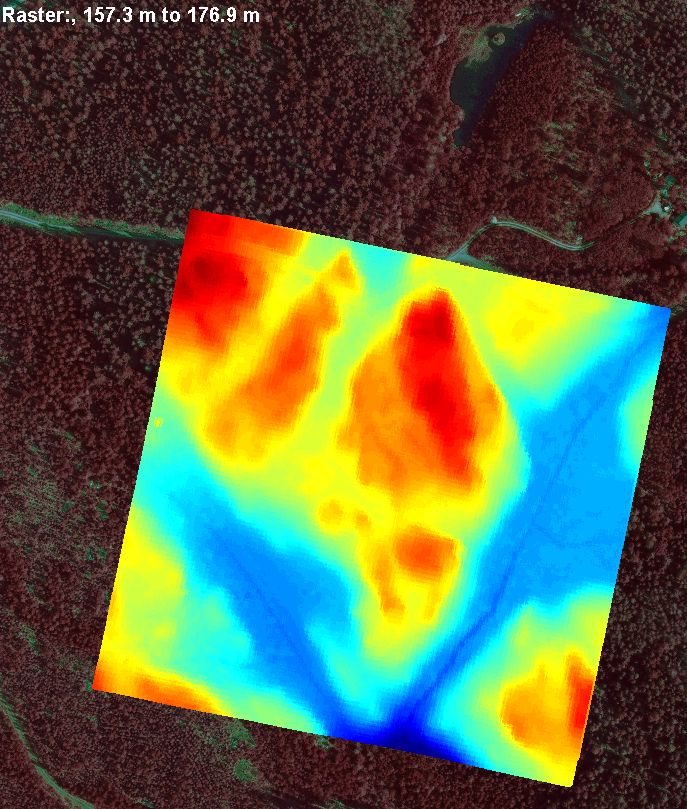
MARV1-2008 Koeala 4,
300 x 300 m maastomalli, rasterimalli tulostettuna
ilmakuvalle. Ojitusalueen ojat näkyvät mallissa, jolle
voidaan
otaksua noin 0.3 m keskimääräinen tarkkuus (67 %
tapauksista
oikea korkeusarvo poikkeaa vähemmän kuin 0.3 m).
Muita algoritmeja:
Yleisesti käytetty DEM-algoritmi on P. Axelssonin (1999, ISPRS JPRS) ehdottama TIN-verkon tihentämiseen perustuva algoritmi, jossa on kolme parametria, joilla määritellään uskottava maaston muoto (vrt. kaupunkialueella rakennusten, ajoneuvojen jne. suodatus). Se on implementoitu mm. suomalaiseen TerraSolid ohjelmistoon, joka on markkinajohtaja laserdatan käsittelyohjelmistojen joukossa.
Yleisesti ottaen jyrkät maastonpiirteet ovat ongelmallisia (ääretön derivaatta) kaikille algorimeille.
MARV1-algoritmi ei osaa poistaa suuria rakennuksia (suurempia kuin 1.5 x hilakoko), ja algoritmi tuottaa maastomalleja, jotka porrastuvat jyrkissä rinteissä (jos kaltevuus on suurempaa kuin Z-väli/hilakoko. Hilakoon pienentäminen tarkentaa mallia, mutta johtaa puustoisissa kohteissa tilanteisiin, jossa ruudussa ei ole lainkaan maosumia. MARV1-algoritmia testattiin yli 20000 testipisteessä Hyytiälässä ja tarkkuus oli 25 cm tai parempi käytettäessä tiheää LiDAR-pisteistöä.
Muita algoritmeja:
Yleisesti käytetty DEM-algoritmi on P. Axelssonin (1999, ISPRS JPRS) ehdottama TIN-verkon tihentämiseen perustuva algoritmi, jossa on kolme parametria, joilla määritellään uskottava maaston muoto (vrt. kaupunkialueella rakennusten, ajoneuvojen jne. suodatus). Se on implementoitu mm. suomalaiseen TerraSolid ohjelmistoon, joka on markkinajohtaja laserdatan käsittelyohjelmistojen joukossa.
Yleisesti ottaen jyrkät maastonpiirteet ovat ongelmallisia (ääretön derivaatta) kaikille algorimeille.
MARV1-algoritmi ei osaa poistaa suuria rakennuksia (suurempia kuin 1.5 x hilakoko), ja algoritmi tuottaa maastomalleja, jotka porrastuvat jyrkissä rinteissä (jos kaltevuus on suurempaa kuin Z-väli/hilakoko. Hilakoon pienentäminen tarkentaa mallia, mutta johtaa puustoisissa kohteissa tilanteisiin, jossa ruudussa ei ole lainkaan maosumia. MARV1-algoritmia testattiin yli 20000 testipisteessä Hyytiälässä ja tarkkuus oli 25 cm tai parempi käytettäessä tiheää LiDAR-pisteistöä.