Metsikkökoealojen puut on mitattu puoliautomaattisella menetelmällä käyttäen 2.5 km korkeudelta otettuja digitaalisia ilmakuvia ja 1000 m korkeudelta saatuja laserkeilaushavaintoja. Kesäkuun 2007 ilmakuvien resoluutio on 25 cm ja kukin puu näkyy vähintään 10 eri suunnasta. Kuvat on otettu Vexcel Ultracam D kameralla, jossa on 5 kanavaa: R, G, B, NIR (lähi-infra) ja PAN (näkyvä valo). Laserpulsseja on keskimäärin 10-12 jokaista neliömetriä kohti, aineistossa on yhdistetty vuoden 2006 ja 2007 keilaukset. Jokaisesta pulssista on 1, 2, 3 tai 4 paluukaikua, jotka ovat 3D pisteitä. Keilaimet rekisteröivät kaiun voimakkuuden, intensiteetin.
{kind=link}
Menetelmässä ratkaistaan kullekin puulle:
- Latvan paikka, XYZ
- Puun pituus, h, käyttäen laserkeilausaineistosta laadittua maaston korkeusmallia
- Latvusmalli ja siitä latvuksen leveys, dcrm
- Puulaji, Sp, a) Visuaalinen tulkinta b) kuva- ja laserpiirteillä luokiteltu
- Rungon rinnankorkeusläpimitta, epäsuorasti, ennustamalla d13 = f(Sp, h, dcrm) -funktioilla (Kalliovirta ja Tokola, 2005).
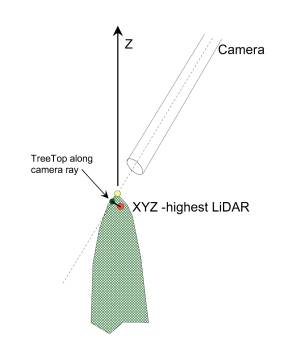 Latvan XYZ sijainti ratkaistaan "monoplotting" periaatteella.
Latvan XYZ sijainti ratkaistaan "monoplotting" periaatteella.Operaattori osoittaa, miltä tahansa kuvalta, pisteen kuvalla, eli avaruussäteen, jonka varrella latvapiste on. Tämän säteen ympäristöä (putki) tutkitaan 0.5 m säteellä. Ensimmäinen "vastaan tuleva" laserpiste on etäisyydellä d kamerasta. Latvapiste pakotetaan kuvasuoralla etäisyydelle d. Tämä on latvan XYZ-sijaintiestimaatti. Puun pituus saadaan "konsultoimalla" korkeusmallia pisteessä XY - latvan Z arvosta vähennetään maanpinnan Z.
 Latvuksen muoto ratkaistaan sovittamalla puusta heijastuneisiin laserkeilaus(LiDAR)pisteisiin
kolmiparametrinen latvuksen muodon kuvaava malli.
Latvuksen muoto ratkaistaan sovittamalla puusta heijastuneisiin laserkeilaus(LiDAR)pisteisiin
kolmiparametrinen latvuksen muodon kuvaava malli. Puulaji ratkaistaan ottamalla latvuksen pinnalta, myötä- ja vastavalon puolelta, 1 m latvasta alaspäin, kuvanäytteitä ilmakuvalta sekä laserpiirteistä, jotka lasketaan niiden pisteiden intensiteetistä, jotka ovat lähellä saadun latvusmallin pintaa. Myös operaattori antaa arvion puulajista, visuaalisena tulkintana.
Tämän jälkeen rungon läpimitta voidaan laskea allometrisilla yhtälöillä.
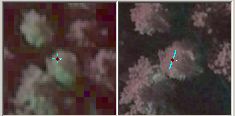
Esimerkki: Ilmakuvapari männystä, vas. 25 cm oik. 9 cm resoluutio.
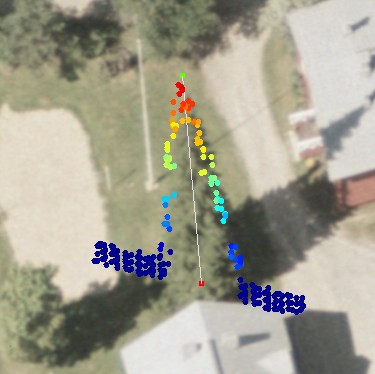
1. Operaattori osoittaa latvan, ja latvapisteen XYZ-ratkaisu pakotetaan tälle avaruussuoralle LiDAR pisteiden avulla.
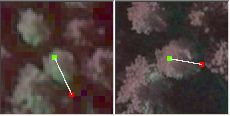
2. Maanpinta antaa puun pituuden, kuvaparille projisoitu "runko"
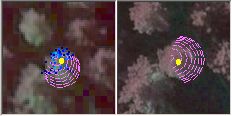
3. Laserosumat kerätään "sopivalta alueelta", aina 60% suhteelliseen korkeuteen asti. Näihin pisteisiin sovitetaan malli latvuksesta käyttäen painotettu pienimmän neliösumman menetelmää (iteroidaan malli kohdilleen, epälineaarinen latvusmalli). "Sopiva alue" tulee puun pituudesta ja ilmakuvan sävyarvosta (Puulaji). Puulaji ja pituus antavat vaihteluvälin odotusarvon latvukselle. Laserosumat on väritetty kuvassa intensiteetin mukaan - niistä lasketaan laserpiirteitä: keskiarvo, keskihajonta, minimi ja maksimi. Keltaiset pisteet ovat vastavalon puolen näytteenottopiste latvusmallin pinnalla, joka on projisoitu kuville. Näytteenotossa otetaan talteen R,G,B,NIR ja PAN -arvot sekä tieto siitä mistä 3D-suunnista auringon valo ja kamera katsovat pisteitä (Wiki: BRDF).
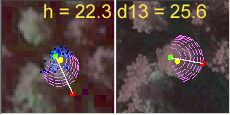
4. Puulaji, h ja latvuksen leveys, 60% suht. korkeudella selittävät d13:a. Tässä Mänty, h = 22.3, latvuksen leveys 3.9 m => d13 25.6 cm.
Yhden puun mittaus vie noin 2-3 sekuntia.