LiDAR aineiston esikäsittely
Ilkka Korpela
Aluepohjaisen tulkinnan valmistelut
Kullekin dataformaatille (Keilaimet: 2004 ALTM1033, 2006 ALTM3100, 2007
ALS50-ii, 2010 & 2011 & 2012 ALS60, 2011 & 2013 & 2015 Riegl LMS-Q680i
ja 2016 Titan) kirjoitettiin aliohjelmat, jolla saattoi kirjoittaa LiDAR dataa ASCII tiedostoon 500 x 500 m pala kerrallaan.
Samalla tehtiin muunnos UTM-koordinaatistoon. ASCII tiedostoon tulostui GPS-aika, X, Y , H, intensiteetti, skannauksen zeniittikulma, kaikujen lkm pulssissa, kaiun numero ja z-koordinaatti metrin tarkkuudella.
Tulostus tehtiin erikseen Tontille ja lähialueille sekä Vuorijärven mallitilan alueelle kampanja kerrallaan. Vuorijärvensuolle tehtiin erikseen 300 x 300 m pala yksinpuintulkintaa varten.
Figure 1. Hyytiälän Tontti ja lähialue sekä Vuorijärven mallitilan alue.
Nämä TXT-tiedostot muunnettiin LAS1.2 formaattiin Martin Isenburgin Lastools ohjelmalla TXT2LAS.exe. 500x500 metrin LAS-tiedostot pystyi yhdistämään myöhemmin LasMerge-ohjelmalla.
43 tavua per pistetietue formaatin generointi puumittauksia varten
Hyytiälän ja SMEARin alueella haluttiin tehdä
puoliautomaattista puiden latvapisteiden kartoitusta. Menetelmässä tarvitaan
suuri määrä laserpisteitä hakuavaruudesta, jossa latvapisteen otaksutaan
olevan. Operaattori klikkaa latvaa ilmakuvalta, ja tiedostoista pitää lukea 3D
volyymi, joka rajautuu kuvasäteen kulkumatkalle, korkeusvälille z_min..z_max.
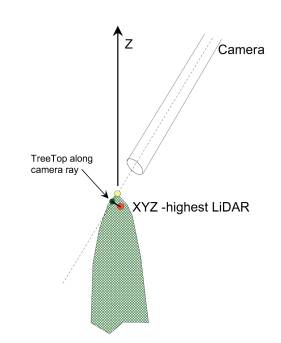
Figure 2. Monoplotting menetelmän toimintaperiaate. Operaattori klikkaa tarkasti latvaa ilmakuvalta ja kohdetilaan lähetetään sylinteri, jonka sisältä etsitään ensimmäinen vastaan tullut laserosuma. Siitä saadaan etäisyys kohteeseen, ja ratkaisu siirretään kuvasäteelle tuolle etäisyydelle.
Analyyseissä päätettiin käyttää pistepilveä, jossa ovat sekä 2015 Riegl että 2016 Titan keilauksen pisteet. Näissä datoissa yhden pulssitietueen koko on 207 tavua per puslsi Titan kanavalla (kaikuja 1-4) tai 80-300 tavua per pulssi Riegl dataa (vaihtuvamittainen pulssitietue, kaikuja 1-10).
Laadittu tietuetyyppi on muotoa
Type sVector3d ‘ pulssin
suuntavektori
i As Single
j As
Single
k As
Single
End Type
Type P3d ‘ yhden kaiun koordinaatit
X As Double
Y As Double
z As
Single
End Type
Type For254Record
return
As P3d '
20 tavua, kaiun koordinaatit
intensity
As Integer ' 2 tavua
intensiteetti
angle As
Byte ' 1 tavu skannauszeniittikulma
pulseCount As Byte '
1 tavu kaikujen lkm
RetNum As Byte
' 1 tavu kaiun järjestysnumero
Wavelen As Byte ' 1
tavu, aallonpituus 532, 1064 tai 1550 nm.
AGC As Byte ' 1 tavu, vapaa varaus ALS50/60
agc (vastaanottimen vahvistusarvolle
range As Single ' 4 tavua, etäisyys keilaimesta kaikuun
DirVect As sVector3d
' 12 tavua pulssin suuntavektori
End Type
Näitä LiDAR yhdelmiä (bin-tiedostoja) tehtiin KKJ alueelle 2514900…2515800, 6859400..6861300.