3D mittauksia ilmakuvilta ja
laseraineistosta - periaatteet
Ilkka Korpela
FOR254 kurssilla käytettiin ilmakuvia, ja
niistä laskettuja ortoilmakuvia sekä ilmalaserkeilaisaineistoja. Lennokilla (drone) otettiin myös kuvia ja videota. Ne otti opiskelija
Henri Riihimäki. Tässä Linkki.
Ilmakuva on 3D -> 2D funktion maalijoukko (surjektio), kun taas LiDAR vastaa
3D-> 3D bijektiivistä relaatiota.
Ilmakuvan pikselit ovat kuvatasolla (2D), jonne kuvasäteet päätyvät 3D kohdetilasta.
Ne kulkevat (teoriassa) suoraan kohteesta kameran polttopisteeseen ja siitä suoraviivaisesti
matkaa jatkaen kameran sisään leikaten kuvatasolla olevan filmin/CCD-sensorin –
suoraviivaisesti. Jos tuntee pikselin, kameran polttovälin ja kameran (polttopisteen)
sijainnin ja kallistukset, voi laskea pikselistä alkavan ja ulos kamerasta
ulottuvan kuvasuoran. Vastaavasti, jos tuntee eo.
kameran tiedot, voi laskea, mihin kuvapisteeseen (pikseliin) annettu 3D piste
päätyy. Kaikki maiseman 3D pisteet samalta kuvasuoralla päätyvät samaan
pikseliin. Kohteelle saa 3D koordinaatit, jos laskee, missä kahdelta tai
useammalta eri kuvalta lasketut pikseleistä alkavat puolisuorat leikkaavat.
Linssit eivät ole täydellisiä, ja suoraviivaisuuden (kollinearisuus) periaate rikkoutuu. Linssikorjaus pyrkii korjaamaan nämä virheet ja saatu uudelleensämplätty kuva vastaa neulanreikäkameralla otettua mahdollisimman hyvin.
Sekä ilmakuvaus että laserkeilaus perustuvat optisen alueen sähkömagneettiseen säteilyyn (valoon). Kamera ei toimi, jos on pimeää, eivät kohteet toisten takaa näy (occlusion). Varjossa olevia kohteita on vaikea erottaa (shading). Keskusprojektiokuvissa kohteet nadirissa näkyvät suoraan päältä, ja näissä kohteissa ei näy säteissiirtymää, suoran puun latva peittää puun tyven. Jos puu on riittävän pitkä, näkyy puolet sen latvasta suorassa valossa ja toinen puoli on puun itsensä eriasteisesti varjostama. Vastavalon puolella näemme latvusten varjoisat puolet, ja myötävalon puolella latvuksia on vaikea erottaa, sillä varjoja ja niiden luoma kontrasti on vähän.
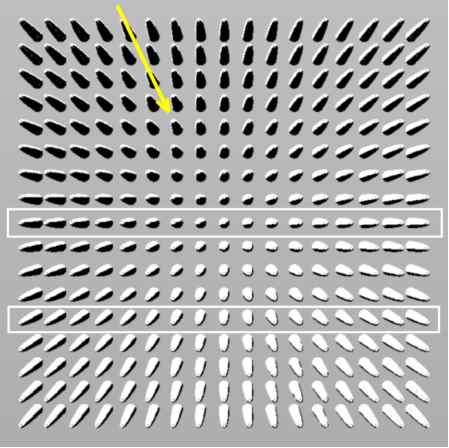
Figure 1. Ilmakuva katselu-valaisugeometria. Keltainen nuoli kuvaa auringonvalon tulosuuntaa.
Laserkeilauksessa katsotaan pulssia sen
lähetyssuunnassa, eli toimitaan ns. hot-spot
geometriassa. Ainoastaan zeniittikulma vaihtelee, kun keilain skannaa maisemaa (usein)
lentolinjaa kohtisuorassa suunnassa. Laserkeilauksessa ei ole varjoja, mutta on
varjostusta. LiDARissa on vain ”yksi pikseli”, joka
vuoroin lähettää valoa ja vuoroin kuuntelee palaavaa valoa. Samoin kuin
kamerassa, tarvitaan tieto siitä missä paikassa ja asennossa keilain oli, jotta
voi laskea valon käyttämän reitin 3D tilassa. Koska laite mittaa kulkuajan,
saadaan valon heijastaneelle kohteelle sijainti tämän reitin varrella. (video).
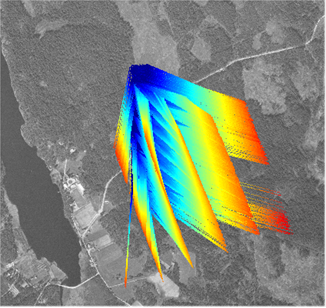
Figure 2. Laserkeilauksessa katselu- ja valaisugeometria muuttuu vain skannaus(zeniitti)kulman osalta. Kuvassa on edetty 600 m etelä-pohjoisuunnassa ja tulostettu laserpulsseja korkealta (1963) otetulle ilmakuvalle. Laserkeilaus on tehty 750 m korkeudelta (Riegl 2015) ja kuvasta näkyy, kuinka sama kohde on keilattu usealta lentolinjalta. Puhutaan sivupeitosta. FOR254 aineistoissa skannauskulma saattoi olla jopa +/- 30 astetta joissakin keilauksissa. Kaikissa keilauksissa on sivupeittoa linjojen välillä.
Ilmakuvilta kohteiden mittaus perustuu kolmiointiin.

Figure 3. Vasemmalla 1000 m korkeudesta otettu ilmakuva, jolla näkyy Hyytiälän
rakennuksia. Tässä 2016 kuvauksessa oli viisi kuvaa, jolla pihapiiri näkyi.
Niillä on jokaisella osoitettu Vanhan ruokalan harjan N-päätä ja A-talon katon
NW-kulmaa. Oikealla on 5 km korkeudesta otettu ilmakuva, jolle on piirretty
näiden kymmenen kuvasäteen kulku 3D tilassa. 1000 m kuvauksen kuvanottopisteet
sijaitsevat suorien leikkauksessa. Valkoiset viivat kuvaavat lentolinjoja
(jotka tietenkään eivät ole viivasuoria)
Molemmille tekniikoilla on olennaista, että tunnetaan laitteen sijainti ja kallistukset sekä tietoa laitteesta. Kameralle tarvitaan tieto polttovälistä, linssin mahdollisista piirtovirheistä sekä ccd-kennon dimensioista. Laserissa tarvitaan mm. tieto pulsseja poikkeuttavan laitteen peilin asennosta pulssin lähetyshetkellä. Muuten ei voida määrittää puolisuoraa pikselistä/lidarista ulos kohteeseen ja takaisin.
Hyytiälän ilmakuva-aineistoille on tehty ilmakolmiointi (aerial triangulation), joka perustuu kohdetilassa oleviin tunnettuihin pisteisiin (pintoihin, kulmiin, etäisyyksiin, korkeuseroihin) ja liitospisteisiin, jotka löytyvät useilta kuvilta. Kolmioinnissa voidaan hyödyntää (vuodesta 2004 ilmakuva-aikasarjassa) lennonaikaisia GNSS/IMU mittauksia, eli likiarvoja kameran asennolla ja paikalle kuvanottohetkellä.
Hyytiälän laserkeilausaineistolle on tehty
aina jonotasoitus, jossa pyritään kalibroimaan GNSS/IMU laitteiston
systemaattiset virheet (laite tärähtää aina koneen laskussa) sekä joissakin
tapauksissa jonojen väliset erot GNSS/IMU parametreissa eli lennonaikaisia ajasta
riippuvia virheitä.